18. RTAB-Map Optimization and Output
RTAB-Map Optimization and Output
Here we will discuss graph and map optimization, as well as time complexity considerations.
Graph Optimization
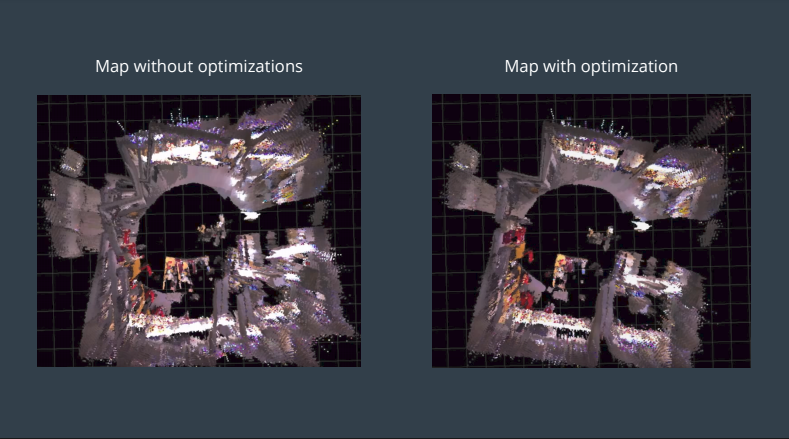
When a loop closure hypothesis is accepted, a new constraint is added to the map’s graph, then a graph optimizer minimizes the errors in the map. RTAB-Map supports 3 different graph optimizations: Tree-based network optimizer, or TORO, General Graph Optimization, or G2O and GTSAM (Smoothing and Mapping).
All of these optimizations use node poses and link transformations as constraints. When a loop closure is detected, errors introduced by the odometry can be propagated to all links, correcting the map.
Recall that Landmarks are used in the graph optimization process for other methods, whereas RTAB-Map doesn't use them. Only odometry constraints and loop closure constraints are optimized.
You can see the impact of graph optimization in the comparison below.
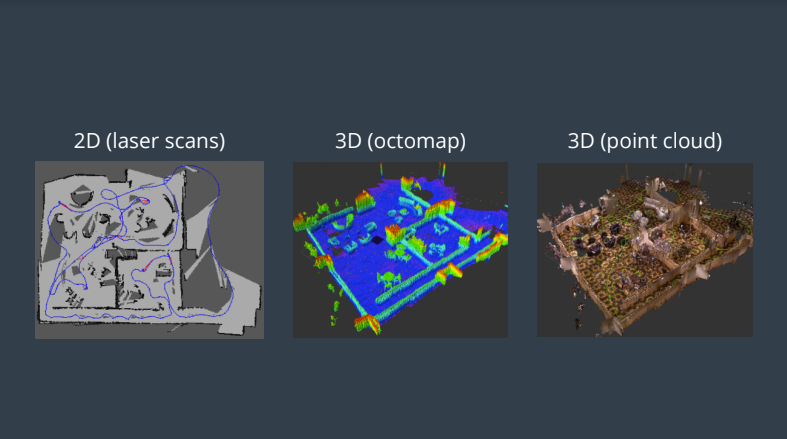
Map assembly and Output
The possible outputs of RTAB-Map are a 2d Occupancy grid map, 3d occupancy grid map (3d octomap), or a 3D point cloud.
Graph SLAM Complexity and the Complexity of RTAB-Map
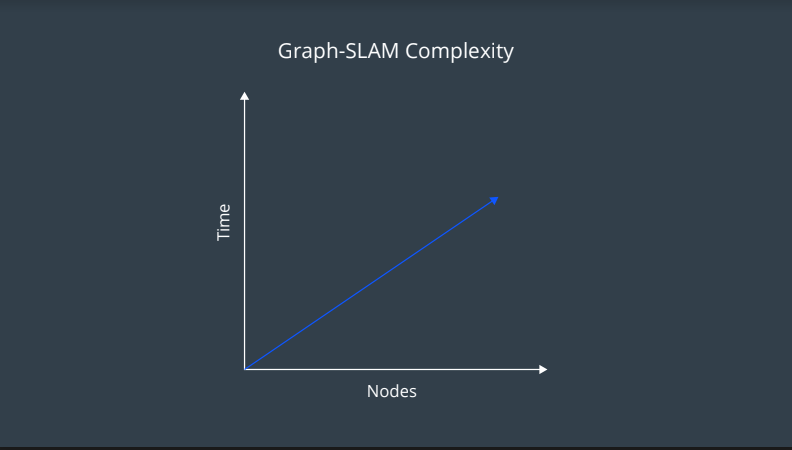
Graph-SLAM complexity is linear, according to the number of nodes, which increases according to the size of the map.

By providing constraints associated with how many nodes are processed for loop closure by memory management, the time complexity becomes constant in RTAB-Map.